5 HYPERPLANES AND HALF-SPACES
5.1. Hyperplanes
A hyperplane is a set described by a single scalar product equality. Precisely, a hyperplane in  is a set of the form
is a set of the form

where  ,
,  , and
, and  are given. When
are given. When  , the hyperplane is simply the set of points that are orthogonal to
, the hyperplane is simply the set of points that are orthogonal to  ; when
; when  , the hyperplane is a translation, along direction , of that set.
, the hyperplane is a translation, along direction , of that set.
If  , then for any other element
, then for any other element  , we have
, we have

Hence, the hyperplane can be characterized as the set of vectors  such that
such that  is orthogonal to :
is orthogonal to :

Hyperplanes are affine sets, of dimension  (see the proof here). Thus, they generalize the usual notion of a plane in
(see the proof here). Thus, they generalize the usual notion of a plane in  . Hyperplanes are very useful because they allows to separate the whole space in two regions. The notion of half-space formalizes this.
. Hyperplanes are very useful because they allows to separate the whole space in two regions. The notion of half-space formalizes this.
| Example 1: A hyperplane in . |
||
Consider an affine set of dimension  in , which we describe as the set of points in such that there exists two parameters in , which we describe as the set of points in such that there exists two parameters  such that such that |
||
|
|
||
The set  can be represented as a translation of a linear subspace: can be represented as a translation of a linear subspace:  , with , with |
||
|
|
||
and  the span of the two independent vectors the span of the two independent vectors |
||
|
|
||
| Thus, the set is of dimension in , hence it is a hyperplane. In , hyperplanes are ordinary planes. We can find a representation of the hyperplane in the standard form |
||
|
|
||
We simply find that is orthogonal to both  and and  . That is, we solve the equations . That is, we solve the equations |
||
|
|
||
The above leads to  . Choosing for example . Choosing for example  leads to leads to  . . |
||
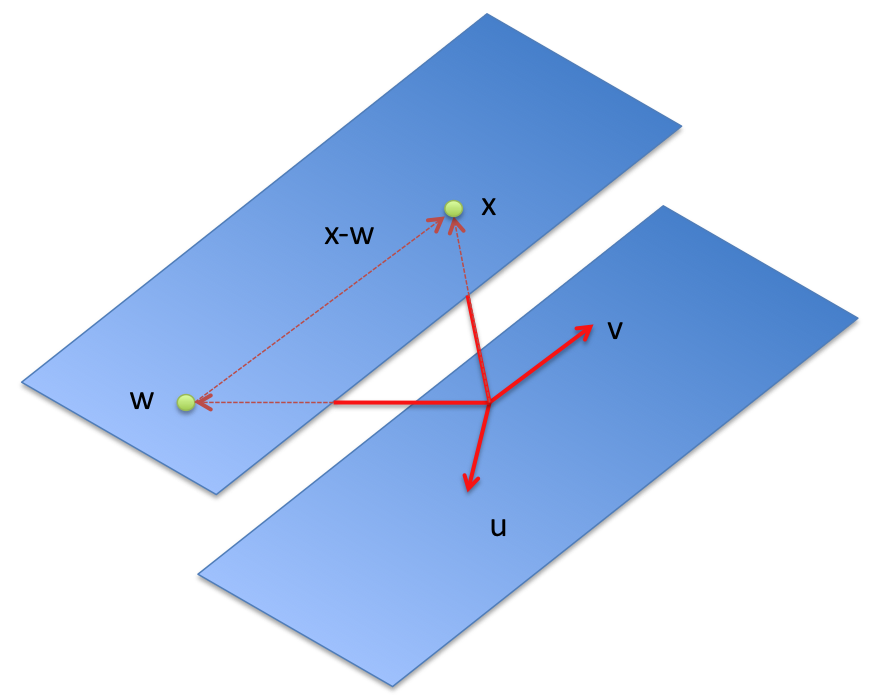 |
The hyperplane can be expressed as  , where , where  is a particular element, and is a particular element, and  are two independent vectors. The set is represented in light blue; it is a translation of the corresponding span are two independent vectors. The set is represented in light blue; it is a translation of the corresponding span  . Any point in is such that belongs to . Thus, we can represent the hyperplane as the set of points such that is orthogonal to , where is any vector orthogonal to both . . Any point in is such that belongs to . Thus, we can represent the hyperplane as the set of points such that is orthogonal to , where is any vector orthogonal to both . |
|
![\[ x = \begin{pmatrix} 3\lambda_1-4\lambda_2 + 4 \\ \lambda_1 \\ \lambda_2 \end{pmatrix} = \begin{pmatrix} 4 \\ 0 \\ 0 \end{pmatrix} + \lambda_1 \begin{pmatrix} 3 \\ 1 \\ 0 \end{pmatrix} + \lambda_2 \begin{pmatrix} -4 \\ 0 \\ 1 \end{pmatrix}. \]](https://pressbooks.pub/app/uploads/quicklatex/quicklatex.com-f8895882bfde7ced26f7b9c9b002f8f6_l3.png "Rendered by QuickLaTeX.com")
![\[ x_0 := \begin{pmatrix} 4 \\ 0 \\ 0 \end{pmatrix}, \]](https://pressbooks.pub/app/uploads/quicklatex/quicklatex.com-6786d8f1bc719fe20b90bddc6ae388eb_l3.png "Rendered by QuickLaTeX.com")
![\[ u := \begin{pmatrix} 3 \\ 1 \\ 0 \end{pmatrix}, \quad v := \begin{pmatrix} -4 \\ 0 \\ 1 \end{pmatrix}. \]](https://pressbooks.pub/app/uploads/quicklatex/quicklatex.com-82effffd5f4bf275f05b716579c15c47_l3.png "Rendered by QuickLaTeX.com")
![\[ \mathbf{H} = \left\{ x \,:\, a^T(x-x_0) = 0 \right\}. \]](https://pressbooks.pub/app/uploads/quicklatex/quicklatex.com-b463e69acaee08d450d2cf7a4620bbf0_l3.png "Rendered by QuickLaTeX.com")
![\[ 0 = a^T u = 3a_1 + a_2, \quad 0 = a^T v = -4a_1 + a_3. \]](https://pressbooks.pub/app/uploads/quicklatex/quicklatex.com-6c0db12aeb811e72ca80c672bb2ef6d9_l3.png "Rendered by QuickLaTeX.com")
5.2. Projection on a hyperplane
Consider the hyperplane  , and assume without loss of generality that is normalized (
, and assume without loss of generality that is normalized ( ). We can represent
). We can represent  as the set of points such that
as the set of points such that  is orthogonal to , where is any vector in , that is, such that
is orthogonal to , where is any vector in , that is, such that  . One such vector is
. One such vector is  .
.
By construction,  is the projection of
is the projection of  on . That is, it is the point on closest to the origin, as it solves the projection problem
on . That is, it is the point on closest to the origin, as it solves the projection problem

Indeed, for any  , using the Cauchy-Schwartz inequality:
, using the Cauchy-Schwartz inequality:

and the minimum length | | is attained with
| is attained with  .
.
5.3. Geometry of hyperplanes
 |
Geometrically, a hyperplane , with  , is a translation of the set of vectors orthogonal to . The direction of the translation is determined by , and the amount by . , is a translation of the set of vectors orthogonal to . The direction of the translation is determined by , and the amount by . |
Precisely, || is the length of the closest point on from the origin, and the sign of determines if is away from the origin along the direction or  . As we increase the magnitude of , the hyperplane is shifting further away along . As we increase the magnitude of , the hyperplane is shifting further away along  , depending on the sign of . , depending on the sign of . |
|
| In a 3D space, a hyperplane corresponds to a plane. In the image on the left, the scalar is positive, as and point to the same direction. |
5.4. Half-spaces
A half-space is a subset of defined by a single inequality involving a scalar product. Precisely, a half-space in is a set of the form

where , , and are given.
Geometrically, the half-space above is the set of points such that  , that is, the angle between and is acute (in
, that is, the angle between and is acute (in ![[-90^{\circ}; +90^{\circ}]](https://pressbooks.pub/app/uploads/quicklatex/quicklatex.com-4527afe6ead8c554678f5090a7f39f24_l3.png "Rendered by QuickLaTeX.com") ). Here is the point closest to the origin on the hyperplane defined by the equality
). Here is the point closest to the origin on the hyperplane defined by the equality  . (When is normalized, as in the picture,
. (When is normalized, as in the picture,  .)
.)
 |
|
The half-space  is the set of points such that is the set of points such that  forms an acute angle with , where is the projection of the origin on the boundary of the half-space. forms an acute angle with , where is the projection of the origin on the boundary of the half-space. |
|
|
The image on the left is a visualization of half-spaces in a 3D context.
|
|
